![]()
 全國服務熱線021-64162222
全國服務熱線021-64162222




 執行器知識
執行器知識 閥門首頁 > 閥門知識 > 執行器知識 >
閥門首頁 > 閥門知識 > 執行器知識 >
角行程電動執行機構的工作原理
電動執行器與氣功執行器一樣.是控制系統中的一個重要部分。它接收來自控制器的0~10mA或4~20 mA的直流電流信號,并將其轉換成相應的角位移或直行程位移,去操縱閥門、擋板等控制機構,以實現自動控制。
電動執行器有角行程、直行程和多轉式等類型。角行程電動執行機構以電動機為動力元件、將輸入的直流電流信號轉換為相應的角位移(0°~90°);這種執行機構適用于操縱蝶閥、擋板之類的旋轉式控制閥。直行程執行機構接收輸入的直流電流信號后,使電動機轉動,然后經減速器減速井轉換為直線位移輸出,去操縱單座、雙座、三通等各種控制閥和其他直線式控制機構。多轉式電動執行機構主要用來開啟和關閉閘閥、截止閥等多轉式閥門,由于它的電機功率比較大,最大的有幾十千瓦,一般多用作就地操作和遙控。
幾種類型的電動執行機構在電氣原理上基本上是相同的,只是減速器不一樣。以下簡單介紹一下角行程的電動執行機構。
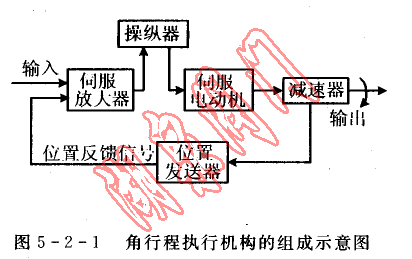
角行程電動執行機構主要由伺服放人器、伺服電功機、減速器、位置發送器和操縱器組成,如圖5-2-1所示。其工作過程大致如下:伺服放大器將由校制器來的輸入信號與位置反饋信號進行比較,當無信號輸入時.出十位置反饋信號也為零,放大器無輸出,電機不轉,如有信號插入,且與反饋信號比較產生偏差.使放大據有足夠的輸出功率,驅動伺服電動機、經減速后使減速器的輸出軸轉動,直到與輸出軸相連的位置發送器的輸出電流與楊入信號相等為止。此時輸出軸就穩定在與該輸入信號相對應的轉角位置上,實現了輸入電流信號與輸出轉角的轉換。
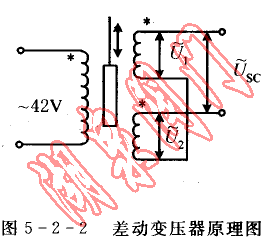
位置發送器是能將執行機構輸出軸的位移轉變為0~10 mA DC(或4~20 mA DC)反饋信號的裝置、它的主要部分是差動變壓器,其原理如圖5-2-2所示。
在差動變壓器的原邊加一交流穩壓電源后,其副邊分別會感應出交流電壓U1,U2,由于兩副邊繞組匝數相等,且反向串聯.故感應電壓Usc的大小將取決于鐵心的位置。
鐵心的位置是與執行機構輸出袖的位置相對應的。當鐵心在中間位置時,因兩副邊繞組的磁路對稱,故在任一瞬問穿過兩副邊繞組的磁通都相等,因而感應電壓U1=U2。但圍兩繞組反向串聯,它們所產生的電壓互相抵消,因而輸時電壓Usc等于零。
當鐵心自中間位置有一向上的位移時,使磁路對兩繞組不對稱,這時12邊繞組中交變磁通的幅值將大干下面繞組中交變磁通的幅值,兩繞組中的感應電壓將是U1>U2,因而有輸出電壓Usc=U1-U2產生。
反之.當鐵心下移時,兩電壓的關系將是U2>U1,此時輸出電壓的相位與上述相反,其大小為Usc=U2-U1。
信號Usc經過整流、濾波電路可以得到0~10 mA(或4~20 mA)的直流電流信號,它的大小與執行機構輸出位移相對應。這個信號被反饋到伺服放大據的輸入端,以與輸入信號相比較。
電動執行機構不僅可與控制器配合實現自動控制,還可通過操縱器實現控制系統的自動控制和手動控制的相互切換。當操縱器的切換開關置于手動操作位置時,由正、反操作按鈕直接控制電機的電源,以實現執行機構輸出軸的正轉或反轉,進行通控手動操作。
上一篇:智能樓宇中常用的電動執行器 / 下一篇:氣動調節閥的正反作用的選擇
 閥門資訊
閥門資訊 上海湖泉推動物聯網電動閥門進程,滿足
上海湖泉推動物聯網電動閥門進程,滿足









 滬公網安備 31011402005796號
滬公網安備 31011402005796號
 走進湖泉
走進湖泉